vision-research.eu - The Gateway to European Vision Research
![]()

![]()
You are here: vision-research.eu » Vision Research » Vision in the European Focus » 2013 » Curved Artificial Compound Eye
European team unveils programmable miniature artificial compound eye for robotic applications

In recent times, there is a strong interest in the development of small flying robots for a variety of applications. Developing appropriate sensors and other necessary components at miniature size will help not only to enhance flight efficiency, but also the level of autonomy of such platforms.
In Nature,flying insects represent a remarkable example of smart utilization of very limited resources to achieve a highly efficient navigation. Most of the many navigation tasks that insects develop rely on the visual information provided by their compound eyes. These vision organs yield, compared to vertebrate single-lens eye, low spatial resolution, but a significantly wider distortion-free field of view as well as a very high sensitivity and temporal resolution. These features are particularly beneficial for fast panoramic motion perception that allow visually controlled navigation in a very small volume. An artificial compound eye exhibiting all these properties would represent an ideal miniature sensor for microflying robots to assist in highly autonomous navigation. A number of previous works have tackled the development of a miniature compound eye. However, most of the effort focused on the development of curved compound optics devices, and at most, coupling this with a common planar CMOS photodetector array. These devices yielded a variety of limitations, such as distortion, optical crosstalk, or limited field of view. In addition, data readout and processing were always realized externally, which made them highly unsuitable for integration with small lightweight flying platforms.
CURVACE project
In the last three years, the Laboratory of Intelligent Systems in EPFL (Switzerland), the Laboratory of Biorobotics in the University of Aix-Marseille (France), the Fraunhofer Institute of Applied Optics and Precision Engineering (Germany), and the Laboratory of Cognitive Sciences in the University of Tübingen (Germany) have collaborated in the project CURVACE supported by the 7th Framework Programme of the European Commission to develop fully-functional, self-contained, miniature CURVed Artificial Compound Eyes. The first prototypes have just been published online in a paper in Proceedings of the National Academy of Science.
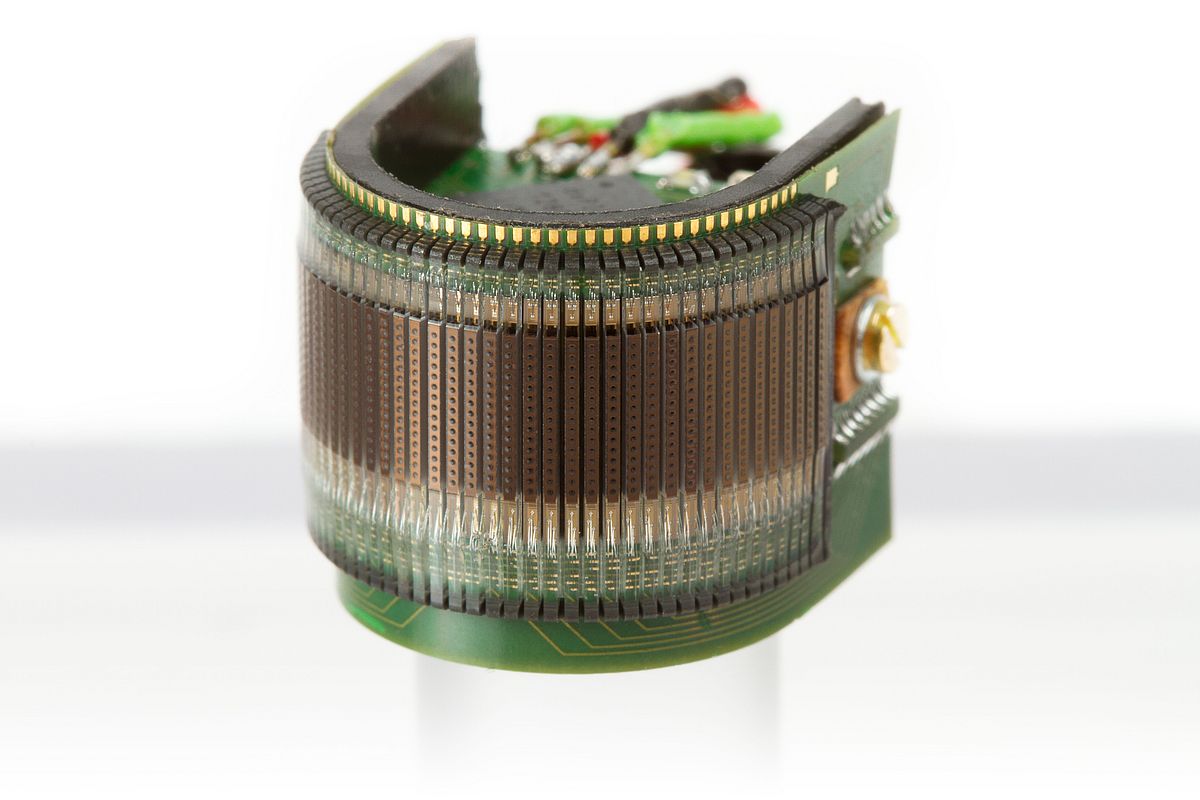
This first CURVACE yields several characteristics similar to the eye of the fruit fly Drosophila and other arthropod species. For instance, CurvACE features a panoramic, hemispherical field of view of 180°x60°, free of distortion or off-axis aberrations in a volume of 2 cm3. Additionally, it yields a signal acquisition bandwidth of 300 Hz, and local adaptation to illumination, which permits very fast motion perception in a wide range of environments from a sunny day to dim light. Our prototype possesses embedded and programmable low-power signal processing, which allows customizable integration onboard terrestrial and aerospace micro vehicles to assist in tasks like collision-free navigation.
 |
 |
 |
 |
Fabrication method
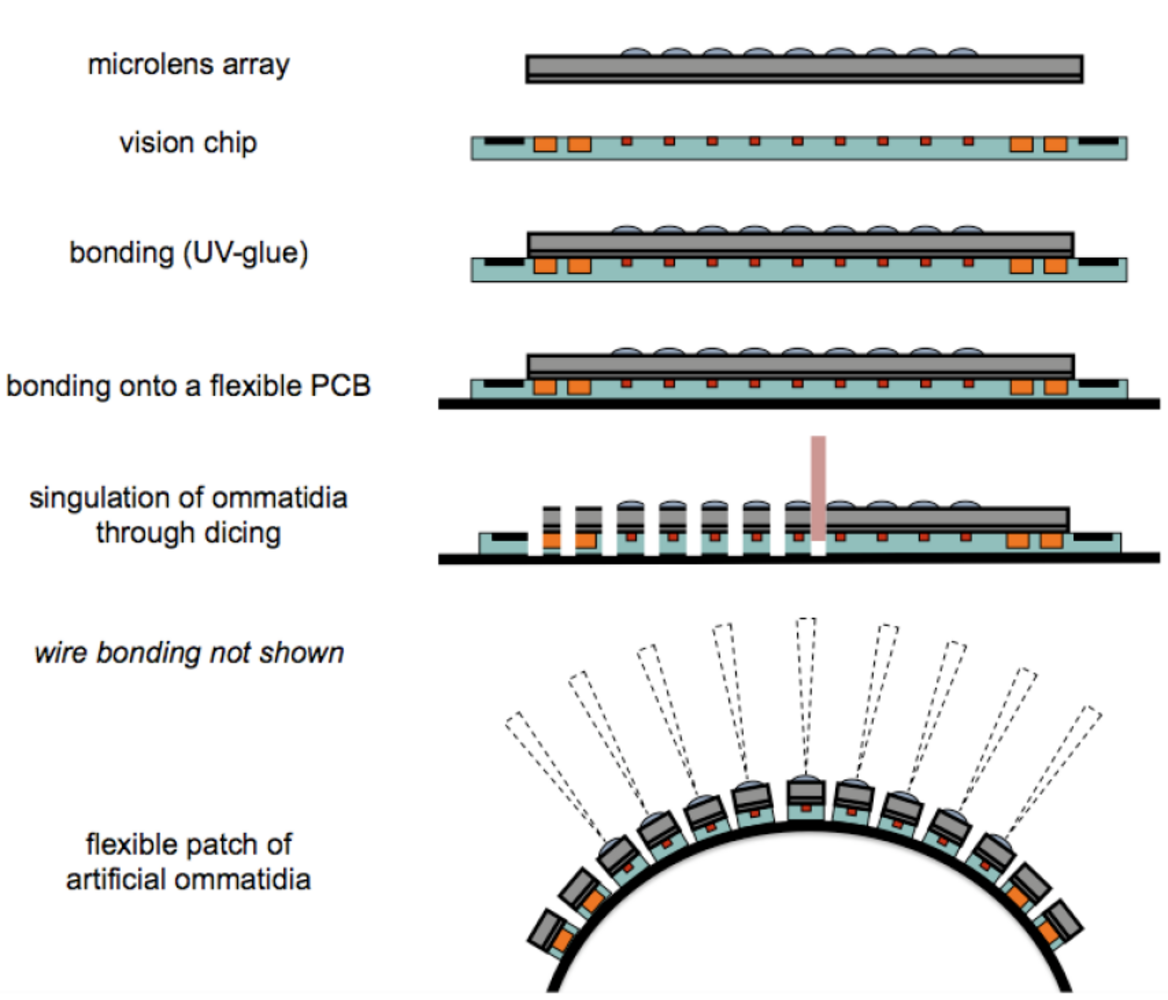
In animal apposition compound eyes, each ommatidium consists of a microlens that focuses light from a specific section of the insect field of view through an optical waveguide onto an independent set of photoreceptors. Commonly, the ommatidial array wraps up the head of the insect, which compacts its overall size notably. Similarly, the CURVACE artificial ommatidia consist of three different layers, namely, an array of microlenses, an array of analog VLSI photodetectors, and a flexible PCB that mechanically supports and electrically connects the ensemble. All these layers are fabricated individually, and subsequently aligned and assembled in planar configuration. The panoramic field of view is provided by dicing the rigid parts of the ommatidia in columns down to the PCB, which remains intact, allowing the mechanical bending of the ensemble to a small radius of curvature. Additionally, the field of view in the non-bent direction is enhanced by applying a longer pitch distance between the microlenses than the one between the photodetectors. Thanks to the low thickness of the artificial ommatidia (~1mm), the necessary components for signal readout and processing are embedded in the available internal concavity, which allows the device to be programmed and customized by the user for the intended application.
Optic flow sensor onboard mobile robots
As a first step, CURVACE researchers work on the implementation of optic flow extraction onboard the sensor as well as in developing various sensor morphologies that can suit various applications and environments. With this, CURVACE prototypes can be used integrated with mobile robots and assist them in a number of navigation tasks, such as obstacle avoidance, egomotion estimation or flight stabilization. In addition, CURVACE opens up additional vistas for a broad range of applications in which wide field fast motion detection is necessary, such as home automation, surveillance, medical instruments, prosthetic devices, and smart clothing.
Original Publication in PNAS
D. Floreano, R. Pericet-Camara, S. Viollet, F. Ruffier, A. Brückner, R. Leitel, W. Buss, M. Menouni, F. Expert, R. Juston, M. K. Dobrzynski, G. L’Eplattenier, F. Recktenwald, H. A. Mallot, and N. Franceschini, "Miniature curved artificial compound eyes", Proceedings of the National Academy of Sciences (2013), vol. 110, pp. 9267-9272.
Contact:
Prof. Dario Floreano
Laboratory of Intelligent Systems, EPFL,
Lausanne, Switzerland
Phone: +41 21 693 5230
E-mail: Dario.Floreano[at]epfl.ch
Project manager:
Dr. Claudio Bruschini
E-mail: Claudio.bruschini[at]epfl.ch
Scientific coordination:
Dr. Ramon Pericet-Camara
E-mail: ramon.pericet[at]epfl.ch
Funding and Support
CURVACE is funded by the Future and Emerging Technologies (FET) programme within the Seventh Framework Programme for Research of the European Commission, under FET-Open grant number: 237940.
Website: www.curvace.org